На первом этапе исследователи предлагают выбрать материал, способный поглощать свет на длине волны источника ультрафиолетового излучения, и определиться с подходящим составом исходного вещества. На основе тестирования механических свойств необходимо найти баланс между разрешением 3D-печати и эластичностью модели. Далее ученые проанализировали глубину отверждения материала и точность по осям XY, чтобы определить подходящее время воздействия ультрафиолета на каждый слой.
На основе полученных результатов исследователи настроили систему 3D-печати для нескольких материалов. С помощью 3D-принтера, работающего по технологии DLP, ученые изготовили несколько мягких пневматических актуаторов для роботов размером 2-15 мм при разрешении 150-350 нм. Команда также встроила в некоторые актуаторы разные микроструктуры и дополнительные элементы.
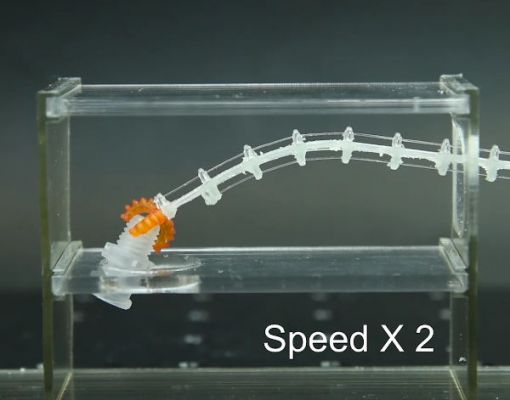
Для демонстрации возможностей применения технологии разработчики создали мягкого робота для удаления мусора – в его конструкции применяется миниатюрный напечатанный на 3D-принтере мягкий пневматический захват. Инновационное устройство может перемещаться в ограниченном пространстве и собирать небольшие предметы в труднодоступных местах.

поделиться статьей с друзьями
добавить сообщение
Отправляя данную форму, даю согласие на обработку моих персональных данных в соответствии с Политикой в отношении обработки персональных данных.