Ученые разработали три поколения роботов, способных самостоятельно обучаться и ремонтироваться. Первый образец, «робот-цыпленок», названный «Генриеттой», самостоятельно научился ходить и перепрыгивать препятствия. Когда робот потерял ногу, он без помощи создателей и программистов научился передвигаться на единственной оставшейся ноге.
Второе поколение самообучающихся роботов было создано студентом магистратуры Теннесом Нюгордом на основе программы-симулятора. Она вычисляла, какой должна быть конструкция будущего робота: например, сколько у него должно быть ног и какой длины, на каком расстоянии друг от друга они должны располагаться. Проще говоря, робот проектировал себя сам.
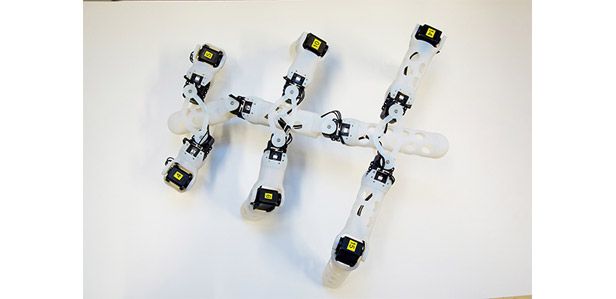
Третье и на сегодняшний день наиболее гибкое поколение роботов было целиком разработано программой-симулятором, которая предлагала оптимальное количество ног и шарниров для самообучающегося и саморемонтирующегося робота. По словам профессора Кюрре Глетте, происходит это следующим образом: «Мы вводим в симулятор данные о том, какие функции должен выполнять робот, как быстро он должен передвигаться, каким должен быть его размер и энергопотребление». Программа перебирает тысячи возможных вариантов и в процессе искусственной эволюции и делает вывод об оптимальной конфигурации модели».
В ходе работы над тремя поколениями роботов процесс усложнился, поскольку ученые требовали от роботов выполнения все более сложных задач. Все роботы были созданы с помощью 3D-принтеров и подвергались проверкам функциональности. Однако во время испытаний команда обнаружила, что «реальная функциональность роботов часто отличается от того, что показывает программа-симулятор», как сообщил профессор Матс Хевин.
В настоящее время основной задачей создателей роботов является сокращение разрыва между тем, как роботы проявляют себя на стадии симулятора, и тем, как они функционируют в реальных условиях. Одна из проверок, которую проходят роботы – это преодоление препятствий, поскольку в идеале среди ключевых функций самообучающегося и саморемонтирующегося робота будет самостоятельное решение непредвиденных проблем. В частности, один из сценариев, предложенный разработчиками, таков: робот движется по территории ядерной электростанции, на которой произошел сбой, и внезапно обнаруживает перед собой лестницу. В таком случае он фотографирует ее, анализирует снимок, а затем на своем собственном 3D-принтере распечатывает и устанавливает деталь, необходимую для преодоления препятствия.
По другому возможному сценарию робот, отправленный в глубокую шахту на отдаленной планете, должен быть способным передвигаться по пересеченной местности, взбираться на камни, а также, при необходимости, менять направление движения. Столкнувшись с проблемой, робот должен будет проанализировать ситуацию и, возможно, установить соответствующие детали: к примеру, добавив дополнительную пару ног, которая позволит ему передвигаться по неровной поверхности.

Технологии 3D-печати успешно применяются не только на стадии разработки оригинальных моделей роботов, но и для саморемонта и самоусовершенствования механизмов, как описано выше в возможных сценариях. «3D-принтер, – объясняет Хевин, – способен создать любую необходимую деталь слой за слоем. Это позволяет не использовать шаблоны, а производить сложные детали в качестве цельного фрагмента».
Университет Осло имеет в своем распоряжении 3D-принтеры стоимостью от 400 000 норвежских крон (примерно 58 000 долларов) до 3 000 000 норвежских крон (примерно 440 000 долларов). Разумеется, как правило, более дорогие принтеры позволяют с большей точностью создавать более сложные детали. На данном этапе исследований пока неясно, каковы будут технические характеристики 3D-принтера, который будет установлен на самообучающихся и саморемонтирующихся роботах.

поделиться статьей с друзьями
добавить сообщение
Отправляя данную форму, даю согласие на обработку моих персональных данных в соответствии с Политикой в отношении обработки персональных данных.